In physical human-robot collaboration, robots currently face a shortcoming due to their limitations in observing and adapting to human dynamics. This further results in an inefficient collaboration and unergonomic interaction. SWITCH will address this shortcoming by developing methods that can efficiently observe human dynamics in real-time and learn anticipatory models from demonstration. First, we will collect several datasets of force and motion capture data for a human-human standing up task. We will then develop models that can learn the behaviors of the two agents (assistant and assisted) in a probabilistic fashion. These models will be exploited for on-line control of robots with reactive and anticipative capabilities.
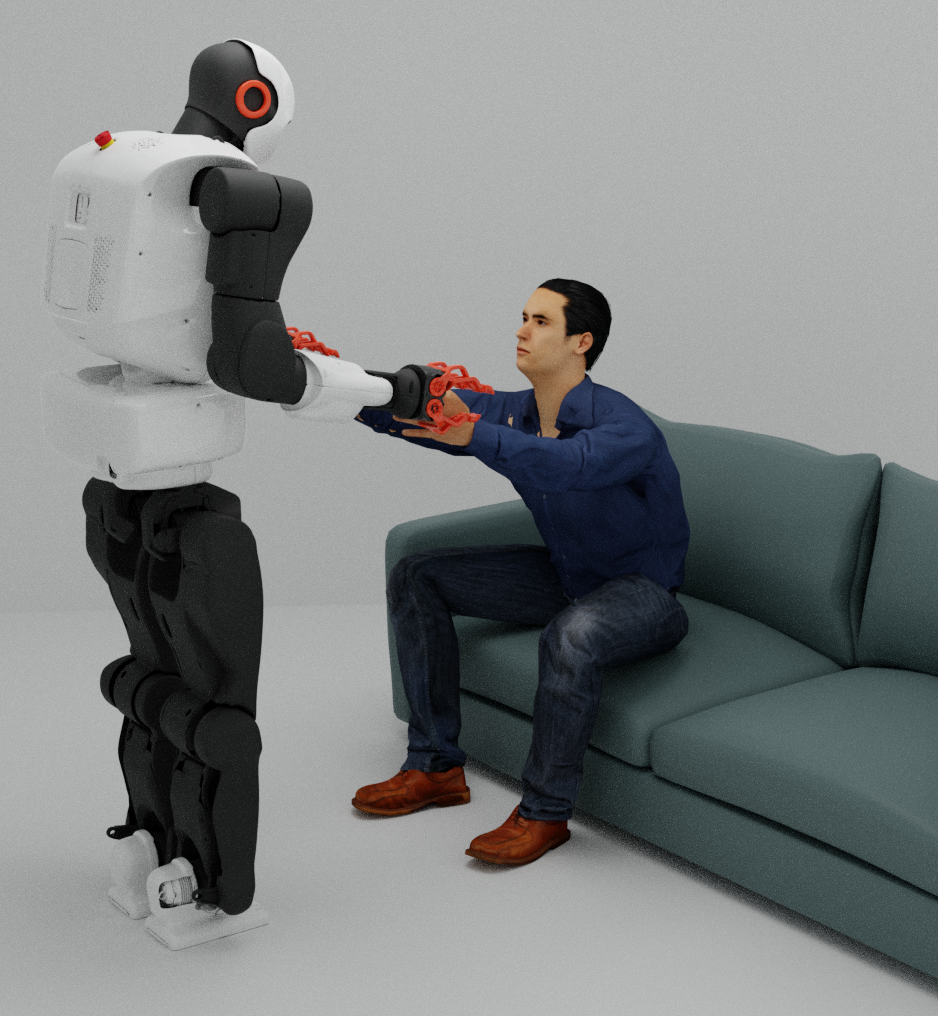
We will concentrate on the specific task of assisting a person to stand up, by considering three scenarios of increasing complexity, from purely reactive behaviors to anticipative and personalized behaviors. One of the novelty of the approach is that learning will be achieved by switching the roles of the assistant agent and the assisted agent. We believe that introducing such strategy in learning from demonstration (LfD) will speed up the learning process by providing a richer set of demonstrations with personalization capability (with the caregiver providing appropriate demonstrations for the person to be assisted). Recordings of human-human, human-robot and robot-human behaviors will also allow us to collected a wider range of sensory information (force and motion). As an encoding strategy, we will consider a novel holistic approach to encode the behaviors of the two agents in a joint model, which will be exploited within regression and model predictive control strategies for reaction and anticipation of the agent behaviors.
As a more general perspective, the research proposed in SWITCH will develop technologies for assistive robots to coexist and physically interact with humans. These technologies will enable robots to be more aware of and care about their human partners, with potential impacts on assistance capabilities in healthcare and household environments. The long term goal is to enable humanoid robots to physically interact and efficiently work with humans. While humanoid robots are already capable of performing several dynamic tasks, it is clear that in human-robot physical collaboration, they have currently a blind spot. Their limitations in observing and adapting to a human dynamics lead to inefficient collaboration and interaction. The approaches and techniques that we propose to investigate in SWITCH will serve us to advance the current state of robot control and learning techniques in assistive humanoid robots to enable robust, goal-directed whole-body motion execution involving physical contacts with environment and humans.
Brecelj, T. and Petrič, T., Stable heteroclinic channel networks for physical human–humanoid robot collaboration, Sensors, 2023 Publication link
Mišković, L., Dežman, M. and Petrič, T., . Pneumatic exoskeleton joint with a self-supporting air tank and stiffness modulation : design, modeling, and experimental evaluation, IEEE/ASME transactions on mechatronics, Publication link
Brecelj, T. and Petrič, T., Utilizing a Phase State System for Reliable Physical Assistance in Human-Humanoid Robot Collaboration, In Proc. 21st International Conference on Advanced Robotics (ICAR), 2023 Publication link
Mišković, L. and Petrič, T., Variable stiffness joint based on pneumatic relocation mechanism, Advances in Service and Industrial Robotics, RAAD 2023, 32st International Conference on Robotics in Alpe-Adria-Danube Region, Publication link
Brecelj, T. and Petrič, T., Application of a phase state system for physical human-humanoid robot collaboration, Advances in Service and Industrial Robotics, RAAD 2023, 32st International Conference on Robotics in Alpe-Adria-Danube Region, Publication link
Razmjoo, A. and Brecelj, T. and Savevska, K. and Ude, A. and Petric, T. and Calinon, S., Learning Joint Space Reference Manifold for Reliable Physical Assistance , In Proc. IEEE/RSJ Intl Conf. on Intelligent Robots and Systems (IROS), 2023, preprint, video, workshop
Ti, B., Razmjoo, A., Gao, Y., Zhao, J., and Calinon, S., A geometric optimal control approach for imitation and generalization of manipulation skills , Robotics and Autonomous Systems, 2023, link
Brecelj, T. and Petrič, T., Zero Moment Line—Universal Stability Parameter for Multi-Contact Systems in Three Dimensions, Sensors, 22(15), 2022, Publication link
Petrič, T. and Žlajpah, L., Phase state system for generating interactive behaviors for humanoid robots, Advances in Service and Industrial Robotics, RAAD 2022, 31st International Conference on Robotics in Alpe-Adria-Danube Region, Publication link
Savevska, A., Kropivšek Leskova, R., Brecelj, T., Mišković, L., and Petrič, T., Fully Sensorized Experimental Environment for Biomechanical Observation of Human Standing-up Motion, In Proc. 31st International Electrotechnical and Computer Science Conference ERK 2022, Publication link
Razmjoo, A., Lembono, T.S. and Calinon, S., Optimal Control Combining Emulation and Imitation to Acquire Physical Assistance Skills , In Proc. IEEE Intl Conf. on Advanced Robotics (ICAR), 2021preprint, video, github
Brecelj, T. and Petrič, T., Angular Dependency of the Zero Moment Point, Advances in Service and Industrial Robotics, 102, 135–144, 2021, preprint
Brecelj, T. and Petrič, T., Application of the Angular Dependency of the Zero Moment Point, 8th International Conference on Electrical, Electronics and Computing Engineering IcETRAN 2021, preprint
Mišković, L., Kropivšek Leskova, R., Gams, A., and Petrič, T., Optimizing end-effector force during the sit-stand task on the Talos humanoid bipedal robot., In Proc. 30st International Electrotechnical and Computer Science Conference ERK 2021, Publication link
Finalist for Best Video Award at the IEEE ICAR 2023 conference for the paper Utilizing a Phase State System for Reliable Physical Assistance in Human-Humanoid Robot Collaboration. Link
Best Research Paper Award at the RAAD 2021 conference for the paper Angular Dependency of the Zero Moment Point. Link
Quasi-passive mechanism for prosthetic or orthotic joint and a method for stiffness modulation at the Slovenian Intellectual Property Office